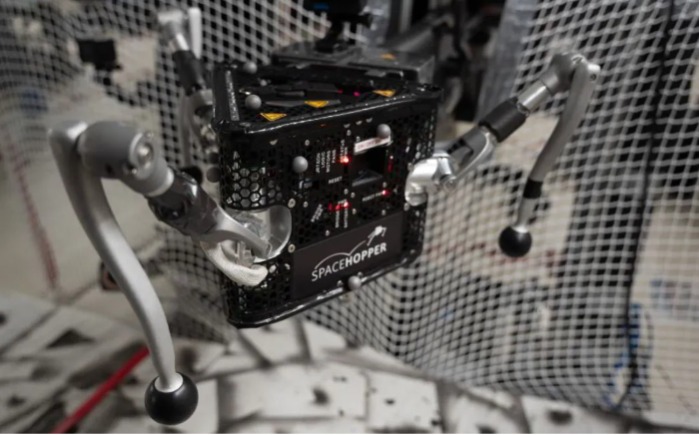
SpaceHopper, zunächst ein Fokusprojekt der Studenten von der ETH Zürich, zielt darauf ab, einen experimentellen Roboter zu entwickeln, welcher sich in Umgebungen mit geringer Schwerkraft, wie zum Beispiel auf Monden und Asteroiden, fortbewegen kann. Er zeichnet sich durch sein dreibeiniges Design und seine hüpfende Fortbewegungsart aus. Das Hüpfen ist in geringer Schwerkraft nachgewiesenerweise die effizienteste Fortbewegungsart und bietet zudem den Vorteil, dass sich der Roboter auch über schwieriges Gelände bewegen kann. Nach der Entwicklungsphase wurde der Roboter und seine Fähigkeiten in einem Parabelflug (ZeroG Flight) der European Space Agency (ESA) getestet. Dafür waren Optimierungen und Anpassungen nötig.
